Autonomous Navigation into Mock Smart City
In this project, we advance one step ahead of our previous project, Autonomous Navigation Using Vision Only Mode.
Skills: ROS2, SLAM, RViz, OpenCV, YOLOv8
Result driven robotics enthusiast with proficiecy in C++ and Python
Master of Science, Robotics [June, 2024]
Drexel University
Languages:
Python, C++, MATLAB
Software Tools:
ROS1, ROS2, Rviz, Gazebo, Git, Docker, LaTex, Linux
Hardware Integartion:
Rosmaster R2, TurtleBot3, Nvidia Jetson (Nano, Orin)
Libraries:
PyTorch, Tensorflow, OpenCV, NumPy, Pandas, Matplotlib

In this project, we advance one step ahead of our previous project, Autonomous Navigation Using Vision Only Mode.
Skills: ROS2, SLAM, RViz, OpenCV, YOLOv8

This project demonstrated the effective use of computer vision techniques, and control algorithms in developing an autonomous navigation system.

The Super-Resolution Convolutional Neural Network (SRCNN) is a pioneering deep learning model developed for single-image super-resolution.
Skills: Keras, OpenCV
NumPy
Matplotlib
scikit-image
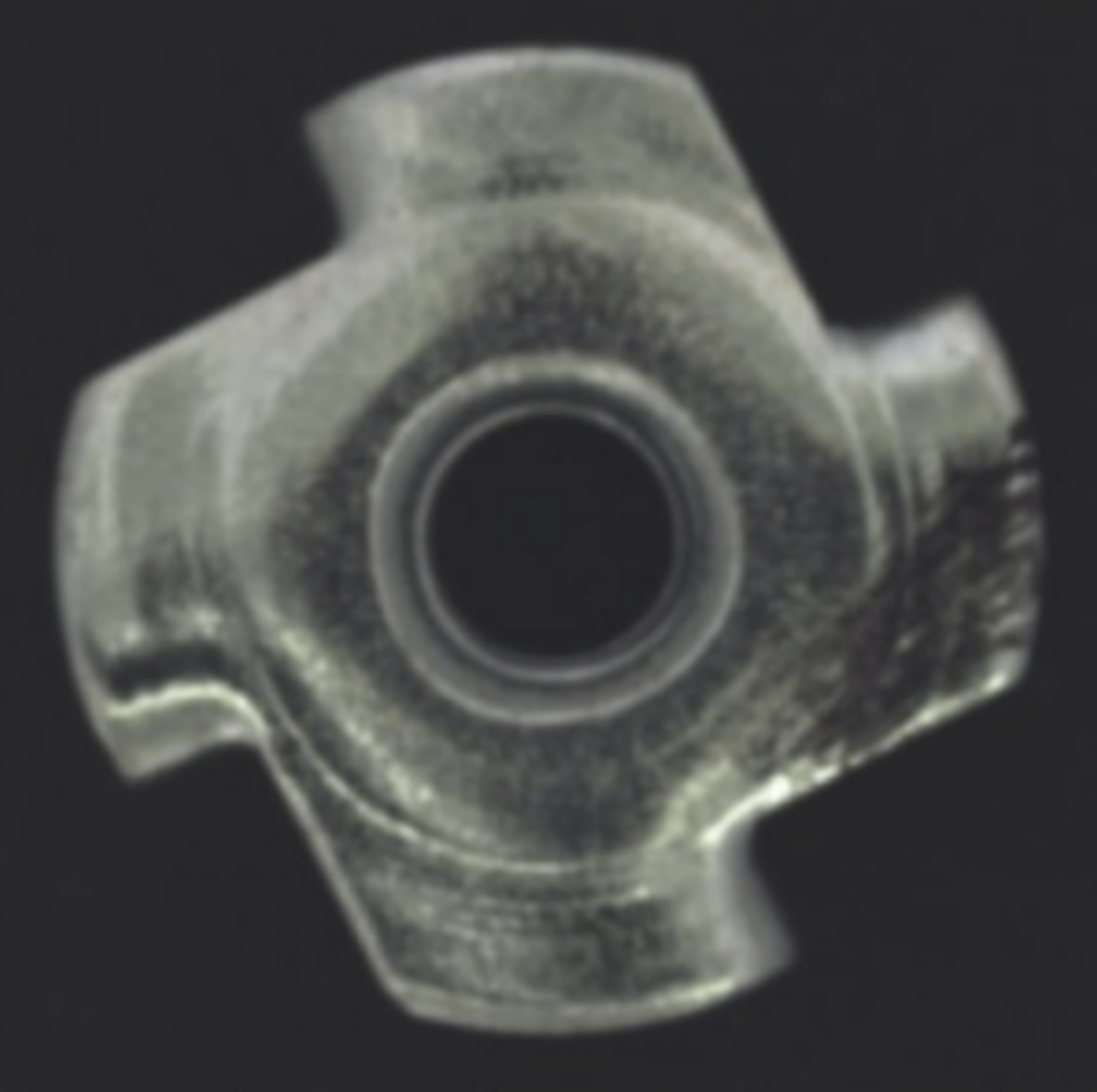
The goal of this project was to create a system that can accurately detect defects in industrial components.
Skills: PyTorch
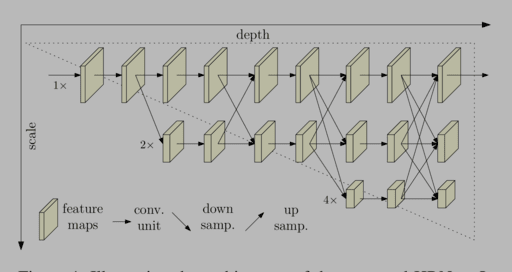
The objective of this project is to segment images of birds and squirrels using the HRNet model for object segmentation.
Skills: Tensorflow, OpenCV, Matplotlib, NumPy

The objective of this project is to remove particular object from a set of images through inpainting.
Skills: Pytorch , Matplotlib, NumPy

In this project, we used deep learning-based inpainting techniques that leverage the generative capabilities of models, allowing for a broader range of inpainting possibilities.
Skills: Pytorch , Matplotlib, NumPy

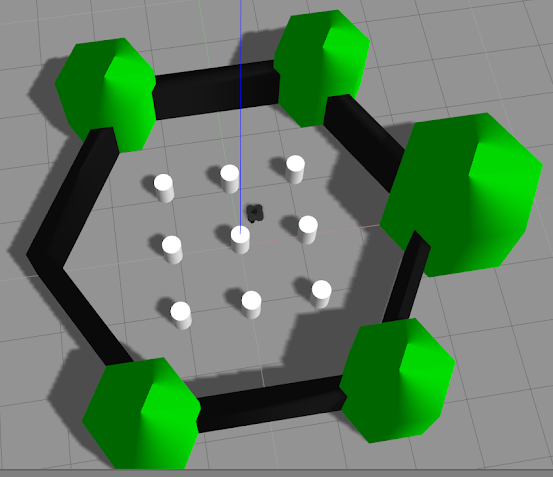
In this project, how
path planning algorithm finds the optimal path in an known
terrain with a multiple obstacle using TurtleBot3 robot into the
Gazebo environment using Dijkstra's and A* is given.
Skills: ROS, Gazebo, Rviz, Docker, SLAM, C++
This project serves as a mere fraction of our comprehensive path planning initiative. This project, although singular in focus,
represents a crucial segment of a larger endeavor aimed at refining path planning methodologies.
Skills: ROS1, Gazebo, Rviz, SLAM, C++